OPEN-CNC-Shield Einstellungen in Estlcam
Nur ein Beispiel, wie es aussehen könnte
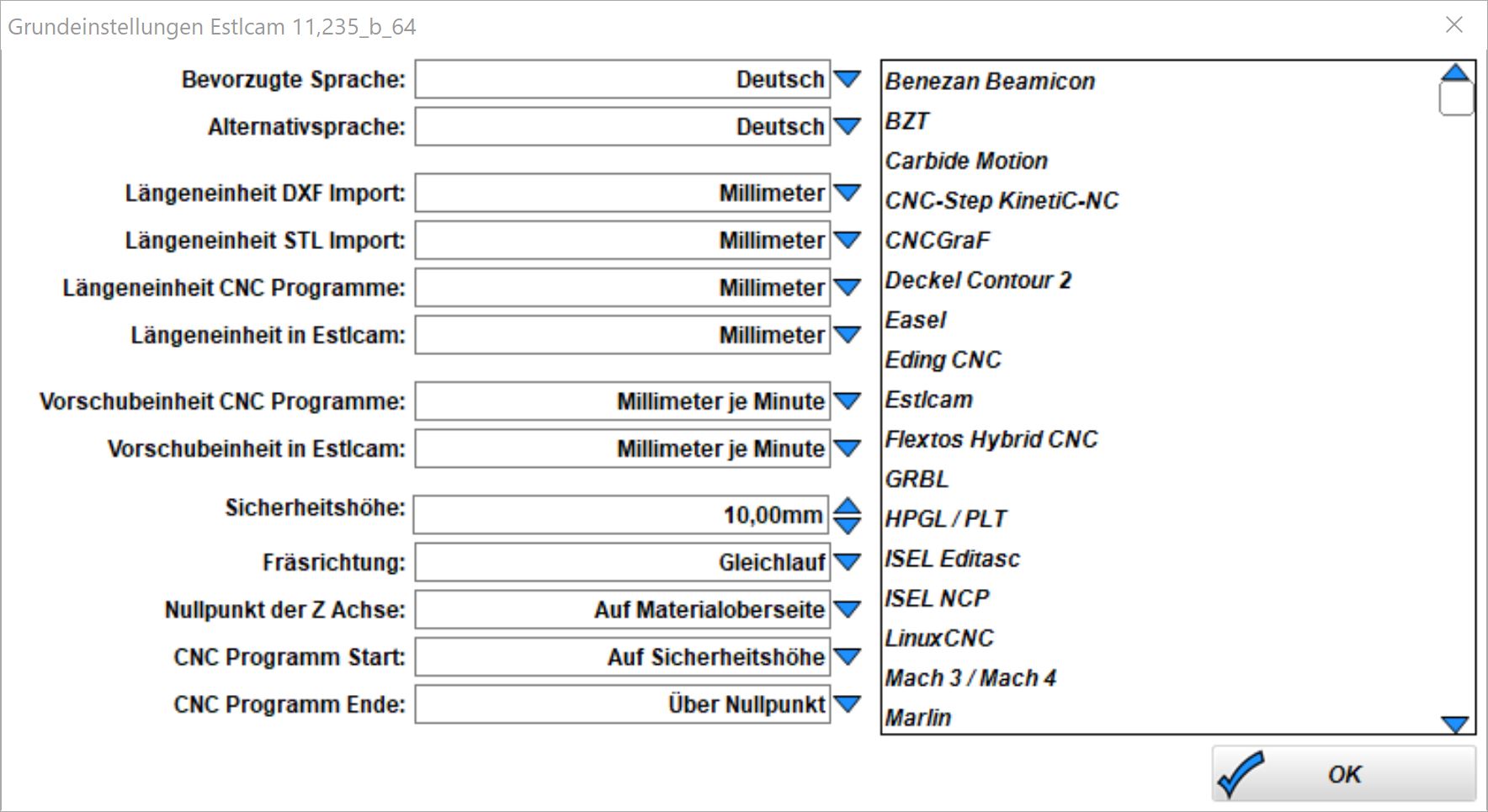
Grundeinstellungen Estlcam
Bei den Grundeinstellungen wird man in der Regel auf der rechten Seite Estlcam oder Marlin auswählen. Ehrlich gesagt konnte ich keinen Unterschied zwischen beiden Einstellungen erkennen. Wichtige Einstellungen sind hier die Sicherheitshöhe, das ist die Höhe, die der Fräskopf bei Bewegungen über dem Werkstück anfährt, sowie die Fräsrichtung. Im Gegensatz zu Frästischen bsp. bei der Holzbearbeitung, bei der man Gegenlauf einstellt, ist die Standard-Fräsrichtung bei CNC-Fräsen Gleichlauf.
Auszug Wikipedia zum Thema Gleichlauffräsen
Beim Gleichlauffräsen bewegt sich die Schneide des rotierenden Werkzeugs im Eingriffsbereich in Richtung des Vektors der Werkstückvorschubrichtung. Baut sich beim Gegenlauffräsen die Kraft langsam auf, so ist sie beim Gleichlauffräsen unmittelbar bei Schneideneintritt am größten, nimmt dann aber kontinuierlich ab. Der Span wird zum Schneidenaustritt hin immer dünner und schließlich abgeschält, wodurch eine im Verhältnis zum Gegenlauffräsen glattere Oberfläche entsteht (auch hier ist der Span kommaförmig, nur wird in diesem Fall anfangs viel Material abgenommen und am Ende wenig). Die kraftrichtungsbedingte Neigung des Fräsers, das Werkstück ruckartig in Vorschubrichtung zu reißen, begünstigt ungewollte Änderungen in der Schlitten- bzw. Werkstückposition. Deshalb muss die Vorschubeinrichtung des Schlittens der Werkzeugmaschine absolute Spielfreiheit bzw. hohe Steifigkeit aufweisen, wofür sich Kugelgewindetriebe eignen. Aufgrund der geringeren Ratterneigung sind die erreichbaren Oberflächengüten beim Gleichlauffräsen gegenüber dem Gegenlauffräsen unter sonst gleichen Zerspanungsbedingungen besser - vorausgesetzt, diese begünstigen nicht die Bildung von Aufbauschneiden.
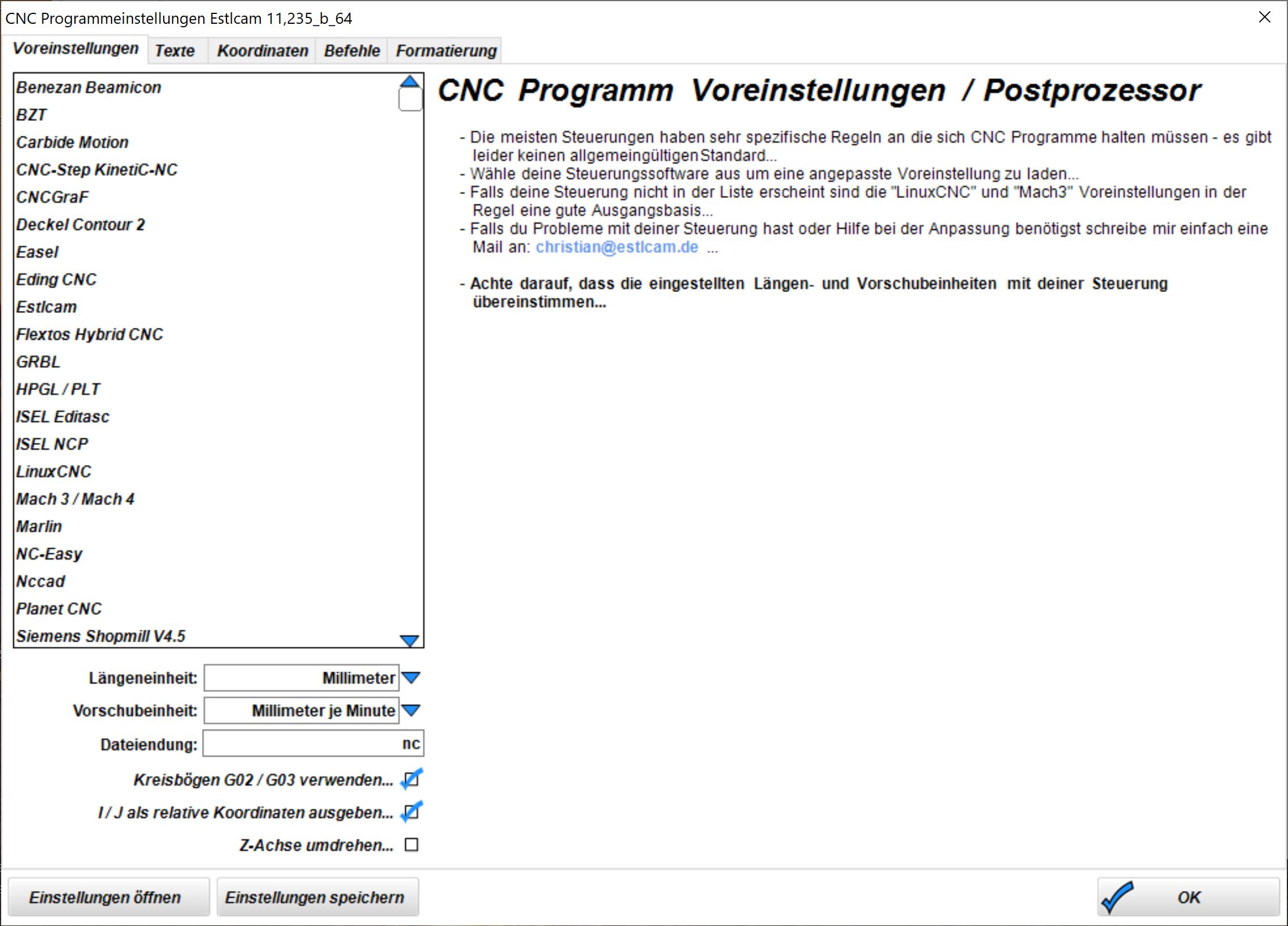
CNC Programmeinstellungen Estlcam
Bei den Programmeinstellungen kann man auch Estlcam auswählen und die Standardeinstellungen belassen, wie sie sind.
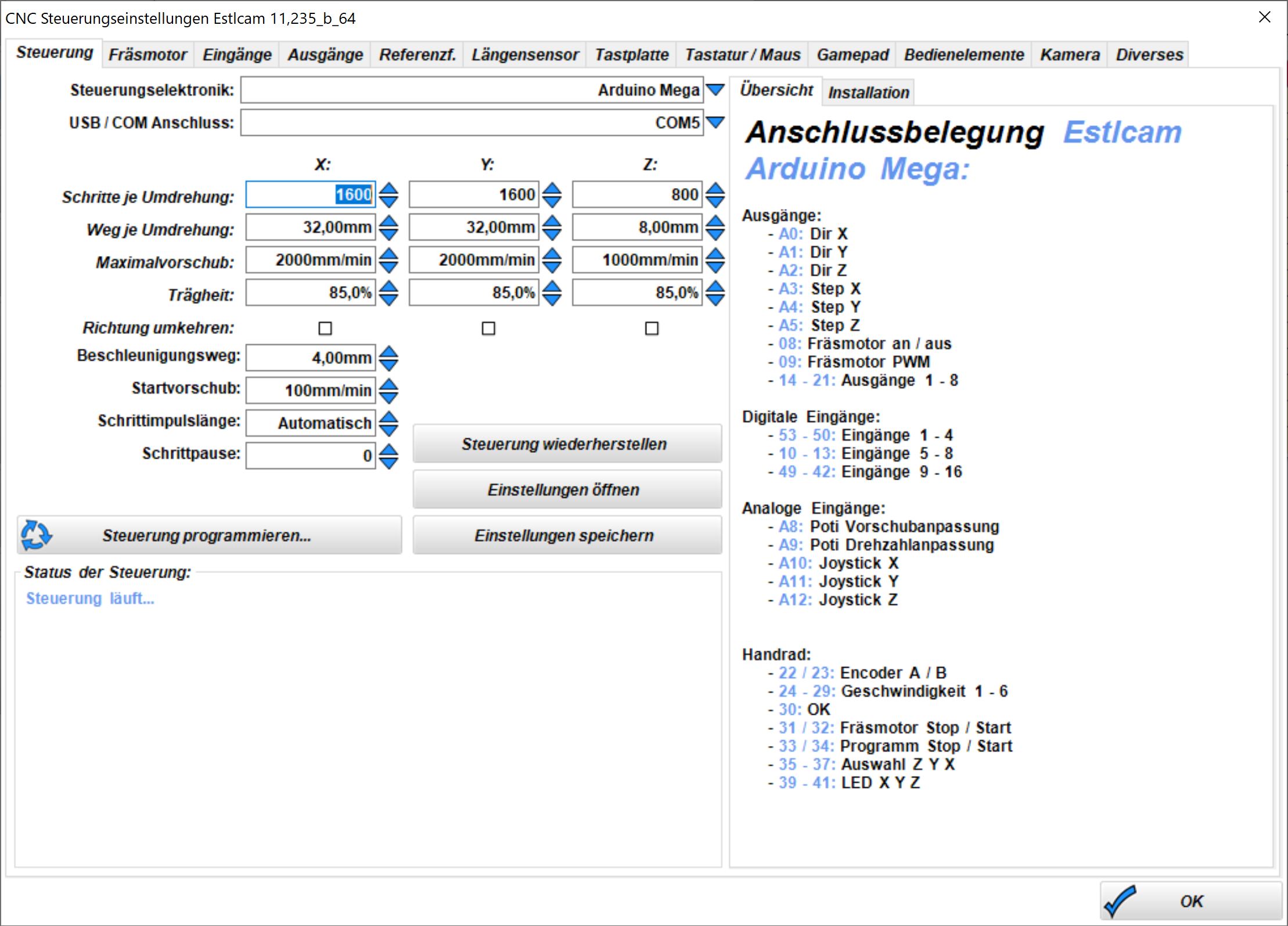
CNC Steuerungseinstellungen Estlcam
Auf die Steuerungseinstellungen kommt es dann an.
- Steuerungselektronik: In meinem Fall der Arduino Mega an COM5
- Schritte je Umdrehung: Hängt natürlich von den Motoren und den Jumpern auf dem CNC-OPEN-Shield ab. Meine Stepper Motoren sind 1,8° Motoren, haben also 200 Steps pro Umdrehung. Auf dem Board sind die Jumper für das Microstepping wie folgt gesetzt: X1 OUT (MS0 und MS1 = 1/8 Schritt), X2 OUT (MS0 und MS1 = 1/8 Schritt), Y1 OUT (MS0 und MS1 = 1/8 Schritt), Y2 OUT (MS0 und MS1 = 1/8 Schritt), Z1 OUT (MS1 = 1/4 Schritt), Z2 OUT (MS1 = 1/4 Schritt) => X = 1600 Steps/Umdrehung, Y = 1600 Steps/Umdrehung, Z = 800 Steps/Umdrehung
- Der Weg durch die 20 Zähne des Pulleys sind 32mm, die Trapezgewindestangen ist eine T8x8, heißt 8 mm Durchmesser und 8 mm Weg pro 1 Umdrehung.
- Maximalvorschub kann man ruhig niedriger ansetzen. Die Nema 17 Motoren haben bereits bei etwas über 1000 mm/min Schwierigkeiten und Schrittverluste
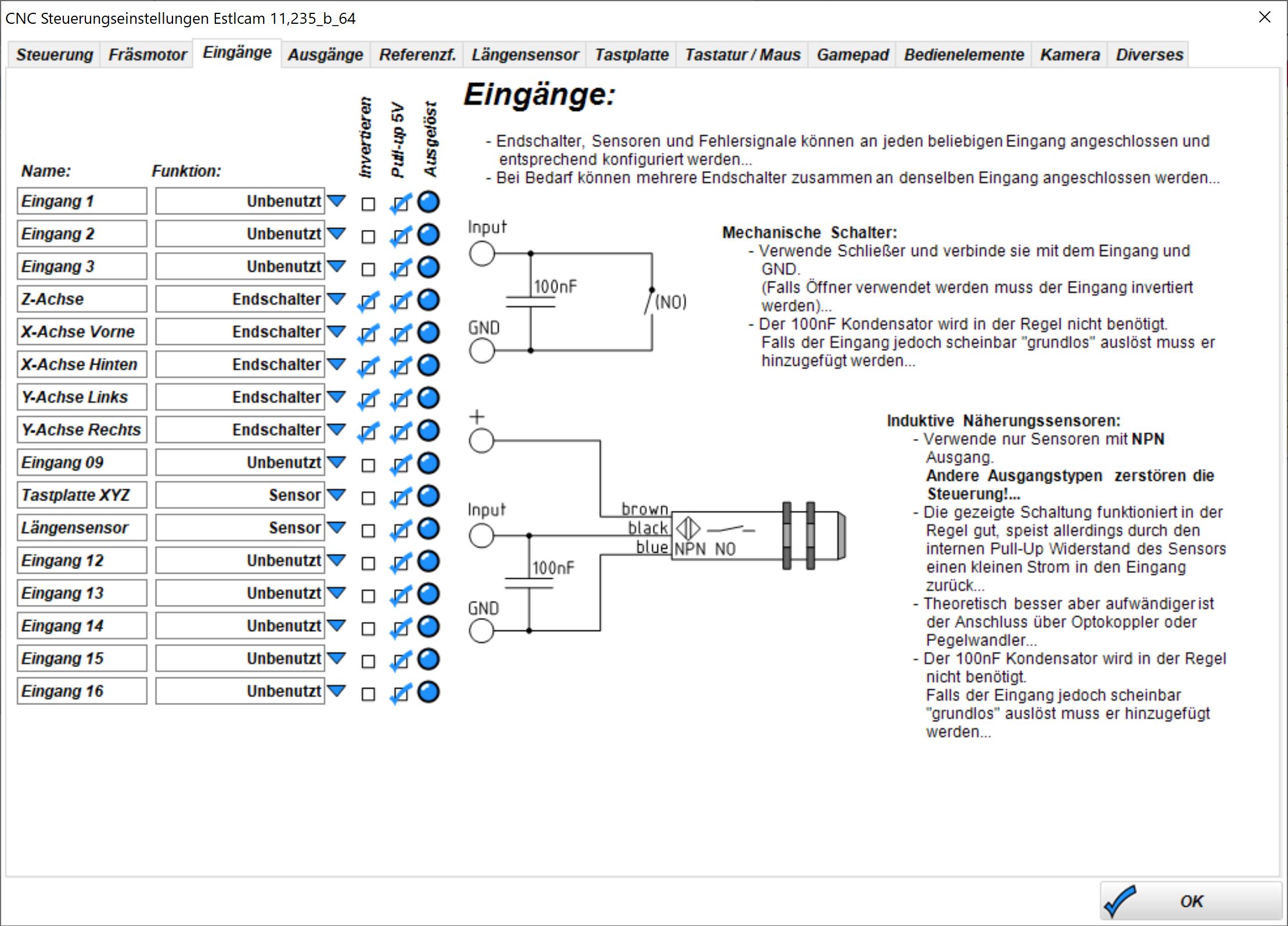
Die Eingänge würde bereits mehrfach beim Thema AutoSquaring genannt. Hier sind die Endschalter (Induktiv-Schalter) auf den Eingängen 4 - 8 angeschlossen. Die Induktiv-Schalter müssen noch invertiert werden, damit sie nicht die ganze Zeit über auslösen. Die Eingänge 1 - 8 (COM3) sind per Jumper (JP13) auf 12V gesetzt. Die Eingänge 9 - 16 sind per Jumper für COM4 frei gelassen. Damit liegt erst einmal keine Spannung an und kann für jeden Port einzeln gesetzt werden.
Da an den Eingängen Längensensor und Tastplatten angeschlossen werden, ist keine Spannung notwendig, da stromlose Kontakte!
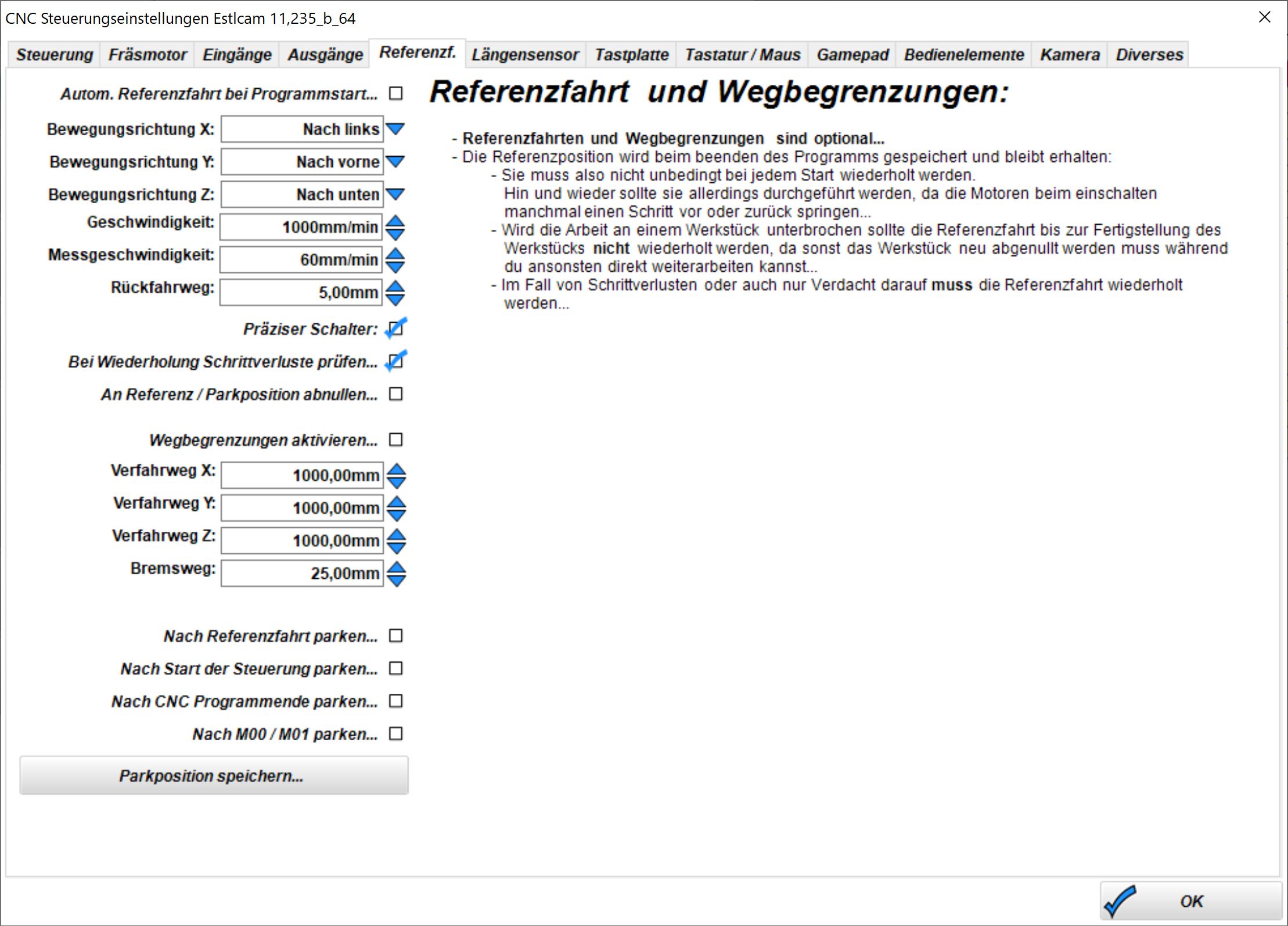
Einstellung der Referenzfahrten sind eigentlich nicht notwendig, wenn man AutoSquaring nutzt. Funktioniert aber, da getestet. Wichtig bei dieser Funktion ist, dass man auf jeden Fall an allen Achsen einen Endschalter hat, da es ansonsten "kracht".
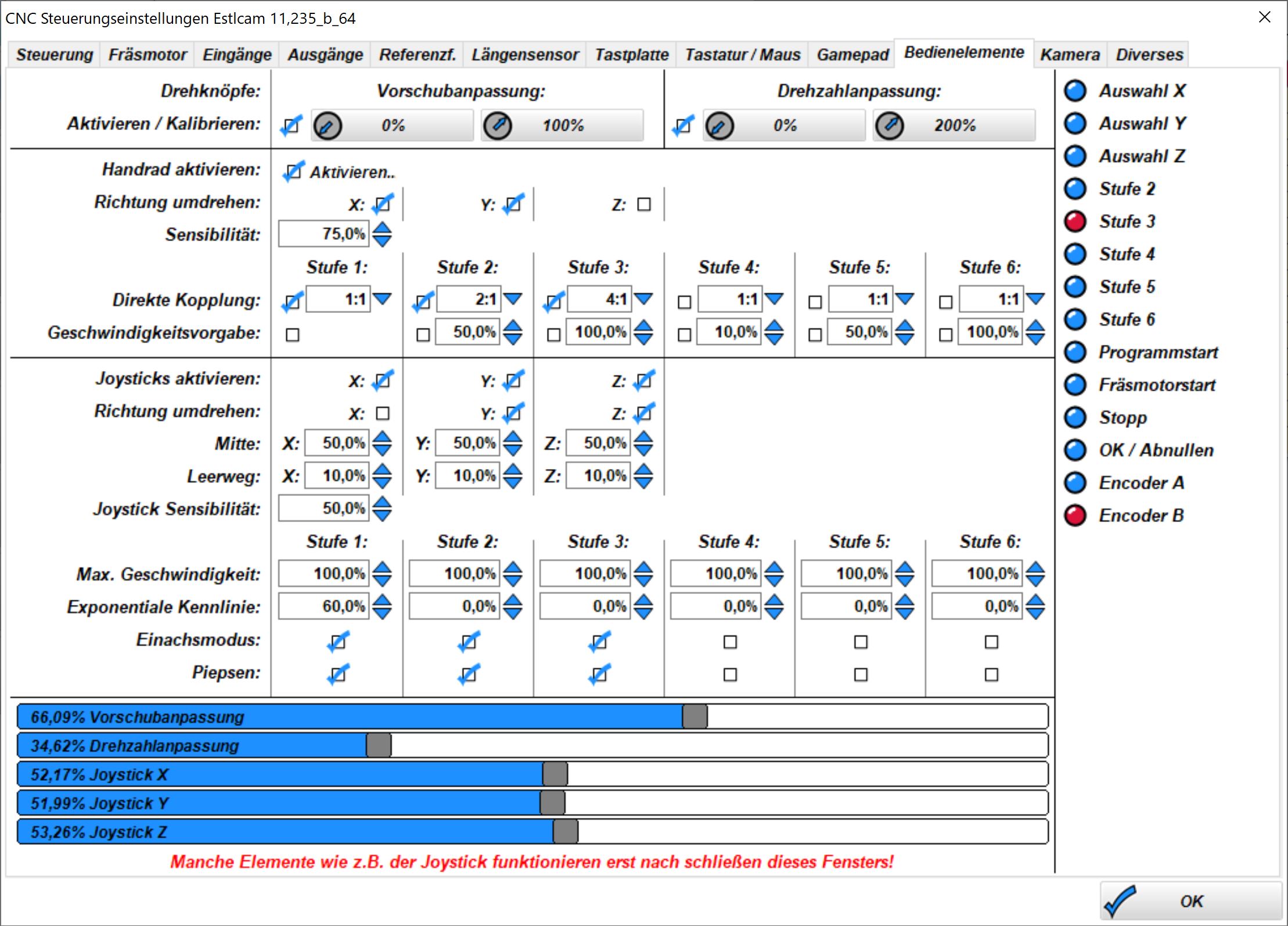
Interessant wird es dann bei dem Reiter "Bedienelemente". Hier können alle Einstellungen für die Schalter, Potis, Joystick, Handrad des Wireless Controllers eingestellt und geprüft werden. Im unteren Bereich sieht man - vorausgesetzt der Wireless Controller ist verbunden, die aktuellen Einstellungen der Potis und des Joysticks. Der Joystick sollte in Ruhe überall bei ca. 50 % stehen und nicht "flackern".
Die Potis lassen sich (ganz oben) kalibrieren, Handrad einstellen (Sensibilität), Geschwindigkeitsschalter (1 - 3) konfigurieren sowie weitere Einstellungen für den Joystick vornehmen. Auf der rechten Seite sieht man sogar, welche der Schalter gerade aktiviert ist, bzw. welche Geschwindigkeit eingestellt ist.
Damit kann es dann auch losgehen, alles eingestellt.